











")


















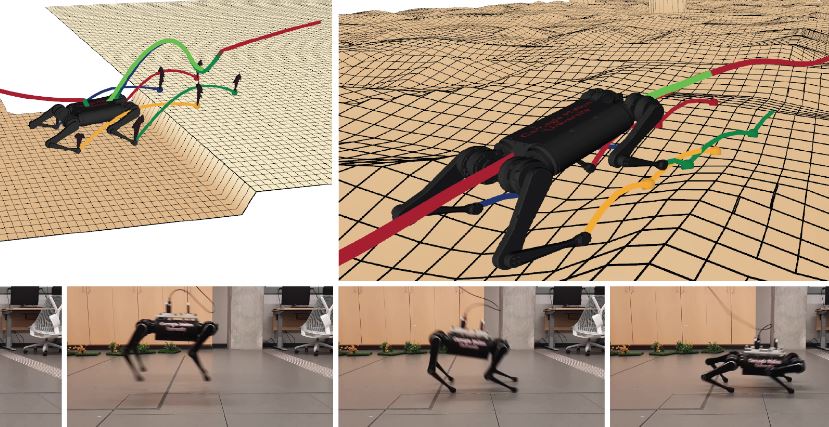
Here is a framework developed for agile quadrupedal robot locomotion developed by the Robomechanics Lab at Carnegie Mellon University. Quad-SDK is an open source ROS-based full stack framework with a modular design that lets researchers experiment with implementation of different components.
More like this ➡️ here
Quad-SDK

Quad-SDK comes with Gazebo simulation support. You can find the code on GitHub.
[HT]
*Our articles may contain aff links. As an Amazon Associate we earn from qualifying purchases. Please read our disclaimer on how we fund this site.












